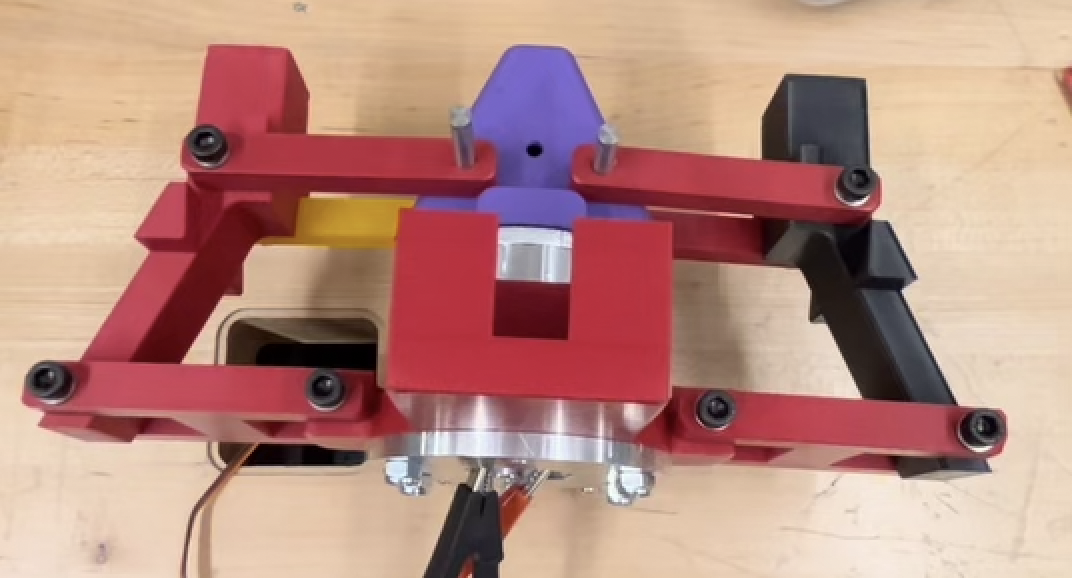
As a part of my work on the Cornell Mars Rover project team, I designed and built an end effector to be mounted onto the rover's arm. This arm was used to pick up rocks of complicated geometry, carry up to 5 kg, and complete several dexterous tasks such as typing on a keyboard, screwing in a screw, moving around a joystick, and flipping switches.